12. ROS 2 Compatibility¶
As stated in the ROS 2 features compilation section, eProsima Shapes Demo can be built and used on a ROS 2 installation with additional ROS 2 features. With ROS 2 features enabled, an additional “Use ROS2 Topics” checkbox in the Participant configuration dialog will be shown.
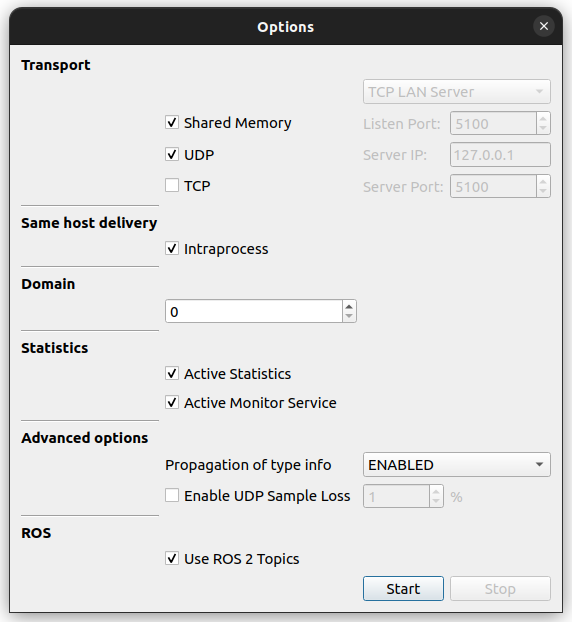
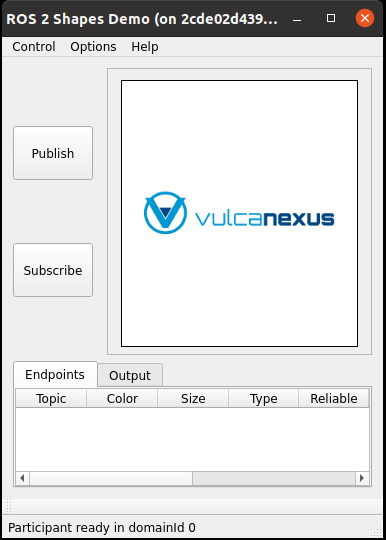
Enabling this box will put Shapes Demo in ROS 2 mode. ROS 2 Shapes Demo main window changes to reflect this by showing a different title and the Vulcanexus logo.
Note
When eProsima Shapes Demo is compiled with ROS 2, the Shapes Demo TypeSupport (see ROS 2 features compilation compilation section) and the ROS 2 Shapes Demo executable is launched in a context with a valid ROS 2 installation sourced, the default value of the “Use ROS 2 Topics” checkbox will be set to true. Otherwise, the checkbox will remain disabled.
When using eProsima Shapes Demo in this mode, ROS 2 will be aware of the Topics transmitted. All topics currently known by ROS can be listed as follows:
ros2 topic list -t
A typical output of the previous command with a Square created by Shapes Demo would be:
/Square [shapes_demo_typesupport/idl/KeylessShapeType]
/parameter_events [rcl_interfaces/msg/ParameterEvent]
/rosout [rcl_interfaces/msg/Log]
Since there is a TypeSupport available for these messages, it can be used by ROS 2 to interact with the different ShapesDemo topics. For instance, assuming the Shapes Demo TypeSupport was built along with Shapes Demo and is currently available in the current installation folder, a subscription to a Topic could be made like so:
source ~/shapes_demo_ws/install/setup.bash
ros2 topic echo /Square
The terminal will start showing the data transmitted on the Square topic:
color: RED
x: 175
y: 215
shapesize: 30
---
color: RED
x: 169
y: 210
shapesize: 30
---
Analogously, a publication could be made like this:
source ~/shapes_demo_ws/install/setup.bash
ros2 topic pub /Square shapes_demo_typesupport/idl/KeylessShapeType "{ color: BLUE, x: 155, y: 170, shapesize: 30}"
On successful execution, this is what would be shown on the terminal:
publisher: beginning loop
publishing #1: shapes_demo_typesupport.idl.KeylessShapeType(color='BLUE', x=155, y=170, shapesize=30)
The ROS 2 Shapes Demo will show the blue Square at the specified location.

Note
ROS 2 Topics enablement will disable some QoS that are not supported by ROS 2 at the moment, namely Ownership and Partitions. Their respective checkboxes will be disabled on the Publisher and Subscriber Dialogs.